Khi robot hình người bật nắp phóng drone như Transformer
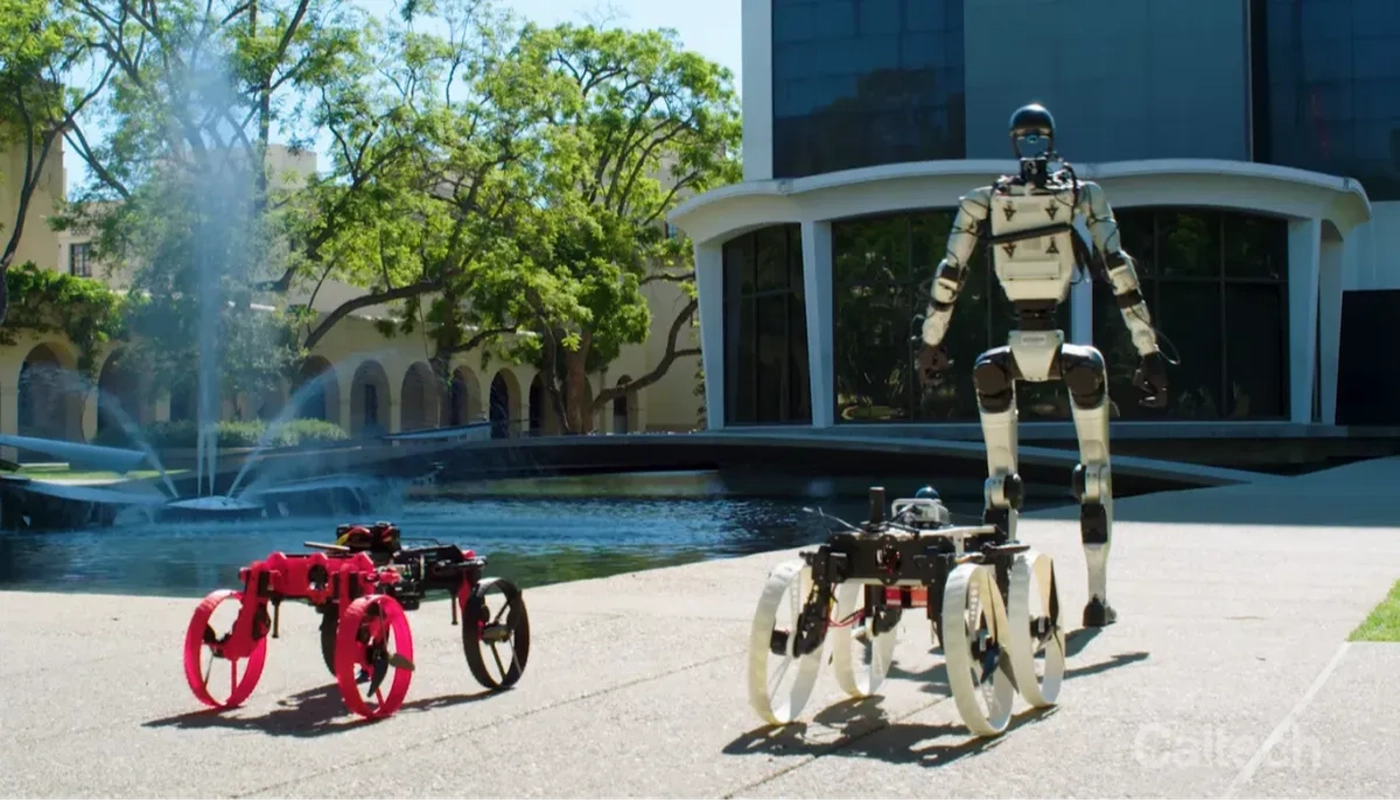
Nếu từng xem Transformers, bạn sẽ khó không liên tưởng khi thấy robot hình người mới của Caltech cúi người xuống, “bật lưng” và phóng một drone biến hình M4 bay vút lên. Không phải Optimus Prime hay Megatron, mà gần với Soundwave – Decepticon cất giữ các robot nhỏ trong ngực – nhưng lần này là bản đời thực.
Các kỹ sư tại Caltech đã phát triển một hệ thống robot đa chế độ (multimodal):
- Nền tảng là robot hình người Unitree G1.
- Trên lưng là drone M4, có thể biến hình để: chạy, lăn, “đi bộ” bằng bánh xe, đứng thẳng kiểu meerkat, leo dốc với trợ lực cánh quạt, và tất nhiên là bay.
Toàn bộ là kết quả của 3 năm hợp tác giữa Center for Autonomous Systems and Technologies (CAST) của Caltech và Technology Innovation Institute (TII) ở Abu Dhabi, UAE. Thay vì chỉ nâng sức mạnh một robot đơn lẻ, họ đang thử nghiệm cách nhiều robot ghép thành một “hệ sinh thái” tự hành.
Ý tưởng: gom ba kiểu chuyển động vào cùng một “hệ”
Hiện tại, chúng ta đã có:
- Robot bay (drone, quadcopter)
- Robot chạy/lăn (xe tự hành, UGV)
- Robot đi bộ (humanoid, biped, quadruped)
Từng loại đều rất tốt trong bối cảnh riêng, nhưng rất hiếm khi ba kiểu chuyển động cùng ở trong một gói thống nhất, phối hợp được với nhau. Aaron Ames, giám đốc CAST và giáo sư hàng không – cơ khí tại Caltech, đặt câu hỏi mà cả dự án cố trả lời:
“Robot có thể bay, robot có thể chạy, robot có thể đi bộ. Tất cả đều tuyệt trong một số kịch bản. Nhưng làm sao gom các kiểu locomotion đó vào một gói duy nhất, để tận dụng ưu điểm của tất cả, trong khi giảm thiểu nhược điểm riêng từng loại?”
Giải pháp của họ không phải nhồi mọi thứ vào một thân máy cực khủng, mà là:
- Để robot hình người xử lý việc:
- Di chuyển trong môi trường có bậc thang, chướng ngại, không gian hẹp.
- Mang vác, thao tác, hiện diện nơi con người ở.
- Để drone M4 xử lý việc:
- Trinh sát nhanh, tiếp cận khu vực khó vào.
- Di chuyển với nhiều kiểu chuyển động tùy địa hình.
Hai nền tảng này liên kết thành một hệ thống, có thể phóng – thu hồi – phối hợp, thay vì hoạt động tách rời.
M4: drone biến hình với bánh xe, chân và động cơ đẩy là một
Trung tâm của “màn trình diễn Transformer” là M4, do nhóm của Mory Gharib tại CAST thiết kế. Ames và lab của ông đảm nhiệm phần cấu hình robot hình người. M4 có thể tái cấu hình cơ thể để chọn cách di chuyển tối ưu cho từng môi trường, với một loạt “tư thế”:
- Lăn trên 4 bánh xe như một xe tự hành nhỏ.
- Biến bánh xe thành cánh quạt và bay như quadcopter.
- Đứng thẳng trên 2 bánh, kiểu meerkat.
- “Đi bộ” bằng cách dùng bánh như bàn chân, từng bước một.
- Dùng 2 cánh quạt hỗ trợ lực đẩy để leo dốc cao trên 2 bánh.
- Khi cần, có thể lăn nhào về phía đích như một vật thể tròn.
Điểm then chốt là các chi/bánh/cánh quạt không cố định vai trò:
- Lúc là bánh xe.
- Lúc là chân.
- Lúc là thruster giúp bay/leo.
Khi cần bay:
- Cả 4 bánh gập lên, lộ ra các cánh quạt.
- M4 rời mặt đất (hoặc rời lưng robot hình người, vốn sẽ cúi gập về trước khi triển khai).
Nhìn từ xa, bạn thấy một “cặp” robot: hình người đứng, cúi, phóng một vật thể, rồi vật thể đó thay đổi hình dạng và hoặc lăn, hoặc bay, hoặc leo dốc. Đây là một dạng đa phương thức (multimodal) rất thật – không còn là hình vẽ concept.
Vai trò của robot hình người: người vận chuyển chậm nhưng bền bỉ
Trong khi M4 lo phần “nhanh, linh hoạt”, Unitree G1 – robot hình người – đóng vai trò:
- Đi bộ (dù chưa phải là mẫu mượt nhất trên thị trường).
- Lên xuống cầu thang, qua bậc, xử lý địa hình mà bánh xe đơn thuần khó vượt.
- Lần theo đường mà drone đã trinh sát, nhưng với tốc độ chậm và ổn định hơn nhiều.
Hình dung một kịch bản tìm kiếm cứu nạn:
- M4 bay vào khu vực đổ nát, trinh sát, dựng bản đồ nhanh.
- Robot hình người mang theo thiết bị, vật tư, lần theo đường an toàn đã được M4 dò trước.
- Hai nền tảng phối hợp, thay vì mỗi loại robot phải gánh hết mọi nhiệm vụ.
Mục tiêu lớn hơn: không chỉ “ngầu” mà phải an toàn & đáng tin cậy
Ở tầng kỹ thuật, dự án này là một phần của nỗ lực lớn hơn để khiến hệ thống tự hành trở nên an toàn và đáng tin nếu chúng thực sự xuất hiện ở khắp nơi quanh con người. Ames nhấn mạnh:
“Chúng tôi nghĩ về kiểm soát an toàn tới mức tối quan trọng, làm sao để có thể tin tưởng hệ thống, đảm bảo chúng an toàn.
Chúng tôi có nhiều dự án vượt ra ngoài hệ thống này, nghiên cứu các mặt khác nhau của tính tự chủ. Đây là những bài toán rất lớn.
Bằng cách có nhiều dự án và mảnh ghép khác nhau trong hợp tác, chúng tôi có thể tấn công những vấn đề lớn hơn và đẩy lĩnh vực tự hành tiến lên một cách thực chất và có tổ chức.”
Nói cách khác, M4 + Unitree G1 là một “demo sống” giúp Caltech và TII:
- Thử nghiệm thuật toán điều khiển an toàn khi nhiều robot phối hợp.
- Khai phá kịch bản tự hành phức tạp, với nhiều kiểu chuyển động và ràng buộc vật lý khác nhau.
- Xem robot ứng xử thế nào khi gặp lỗi, sai sót, tình huống bất ngờ.

Thay vì cố tạo ra một robot “vạn năng” ôm trọn mọi nhiệm vụ, Caltech và TII đang thử một hướng thông minh hơn: một “đội” robot chuyên biệt nhưng gắn vào cùng một hệ, nơi robot hình người lo phần “thân thiện với môi trường con người”, còn drone M4 đảm nhận trinh sát, cơ động và biến hình tùy địa hình.
Sự kết hợp giữa robot hình người Unitree G1 và drone M4 đa chế độ không chỉ là màn trình diễn phong cách Transformer dễ gây ấn tượng trên YouTube; nó là một bước thử nghiệm nghiêm túc cho tương lai nơi hệ thống tự hành phải vừa linh hoạt, vừa an toàn, vừa đáng tin cậy nếu muốn sống chung với con người trong nhà máy, thành phố hay vùng thảm họa.